Позиционный датчик Холла (ПДХ) предназначен для работы на поворотном распределительном вале двигателя внутреннего сгорания (ДВС). Его принцип действия аналогичен датчику Холла автомобильной системы зажигания, который подробно описан в [1]. Различия этих датчиков - конструктивные, что определяется различием их рабочих положений. На рис. 1 показано, как ПДХ устанавливаются относительно распредвалов.
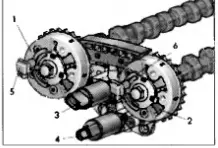
Рис. 1. Датчики Холла на валах: 1 и 2 - актюаторы; 3 и 4 - ЭМГК; 5 и 6 - ДХ
В отличие от датчика системы зажигания, сигнальный диск (магнитный аттенюатор) в ПДХ выполнен не как прерыватель магнитного потока, а как его замыкатель, - сигнал на выходе датчика появляется тогда, когда в рабочем воздушном зазоре не магнитопро-зрачное окно, а магнитопроводная ферромасса. Поэтому ПДХ имеет не щелевую, а торцевую конструкцию рабочего воздушного зазора (рис. 2).
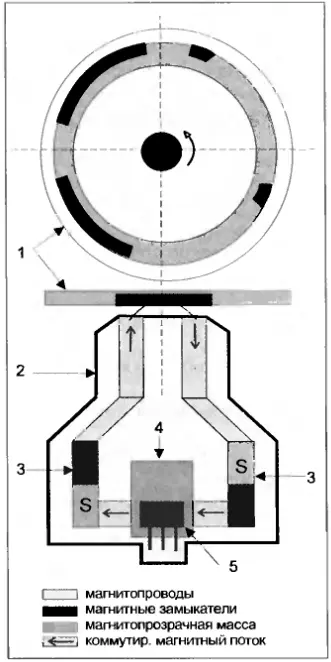
Рис. 2. Позиционный датчик Холла: 1 - сигнальный диск, 2 - корпус датчика, 3 - постоянные магниты, 4 - микросхема, 5 - чувствит. элемент Холла
Из рисунка видно, что магнитный поток через элемент Холла 5 максимален, когда над торцевым воздушным зазором находится магнитный замыкатель (зубец), и минимален, когда здесь устанавливается магни-топрозрачная масса. В первом случае на выходе датчика формируется сигнал, а во втором случае - нет. Прозрачные участки аттенюатора чередуются с магнитными зубцами, число которых по периметру сигнального диска равно числу значащих положений распредвала. В четырехтактном ДВС распредвал че-тырехпозиционный, и сигнальный диск (аттенюатор) ПДХ имеет вид, показанный на рис. 2. Два широких зубца определяют положение распредвала в началах тактов "Выпуск" и "Впуск", а узкие зубцы - положение в началах тактов "Рабочий ход" и "Сжатие".
В электронном блоке управления фазами (ЭБУ-Ф) системы по сигналам от позиционного датчика Холла (ПДХ), датчика начала отсчета (ДНО) и датчика числа импульсов (ДЧИ) (два последних установлены на коленчатом вале) определяется текущее положение распредвала относительно коленчатого вала. Точная фиксация распредвала определяется числом единичных импульсов от датчика положения ко-ленвала, поместившихся между метками распределительного и коленчатого валов. Расчет, фиксация и формирование сигнала управления для электромагнитного гидроклапана (ЭМГК) поворотного рас-предвала реализуются дополнительным микроконтроллером (рис. 3), входящим в состав ЭБУ-Ф.
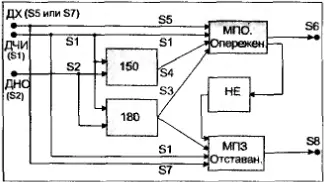
Рис. 3. Микроконтроллер ЭБУ-Ф
Микроконтроллер выполнен на электронных счетных и логических элементах и предназначен для расчета углов поворота распределительного вала относительно коленчатого. Для четырехцилиндрового четырехтактного ДВС микроконтроллер работает следующим образом. По сигналам ДЧИ и ДНО блок управления двигателем определяет его текущее положение. Используя сигналы S5 или S7 датчиков Холла, установленных на распредвалах, блок управления определяет их положение относительно коленчатого вала. В соответствии с этими данными блок управления выдает команды на перестановку распредва-лов вперед или назад. При выходе из строя одного датчика Холла функционирование системы изменения фаз газораспределения прекращается. Двигатель при этом может работать и запускаться. При выходе из строя обоих датчиков Холла двигатель продолжает работать до его первой остановки. После этого запуск двигателя невозможен.

Рис. 4. Сигналы управления фазами
На рис. 4 показаны сигналы, которые имеют место в схеме микроконтроллера.
Сначала на счетную подсистему (на микроконтроллер ЭБУ-Ф) поступают сигналы S1 (см. рис. 3) и S2 от ДЧИ и ДНО. По сигналу S2 в счетчиках 150 и 180 открывается счет импульсов S1 от ДЧИ до полного их наполнения. Так формируется сигнал S3 на выходе счетчика 180 и сигнал S4 на выходе счетчика 150. Выходной сигнал S3 подается на закрывающий вход микропроцессора МПО и на открывающий вход микропроцессора МПЗ, а сигнал S4 подается только на разрешающий вход микропроцессора МПО. На счетные входы микропроцессоров МПО и МПЗ постоянно поступает сигнал S1. Сигнал, приходящий от датчика ПДХ, может или опережать сигнал S3 на угол поворота колен-вала до +30°, и тогда формируется сигнал S5, или отставать от него на угол до -30°, и тогда формируется сигнал S7. Сигнал S5, поступая на разрешающий вход МПО, открывает счет импульсов S1 от ДЧИ. Счет прекращается по сигналу S3 от счетчика 180. Таким образом, на выходе микропроцессора МПО формируется последовательность импульсов (сигнал S6), количество которых соответствует углу сдвига газораспределительной фазы в сторону опережения.
Если фаза отстает, то сигнал на выходе микропроцессора МПО равен нулю, который через логическую ячейку "НЕ" поступает на разрешающий вход микропроцессора МПЗ, открывая формирование на выходе МПЗ числа импульсов отставания (сигнал S8). Счет прекращается по сигналу S7 от ПДХ.
Если сдвига фаз между распределительным и коленчатым валами нет, на выходах обоих микропроцессоров (МПО и МПЗ) числовые значения отсутствуют (сигнал S9). Ясно, что если число импульсов S1, приходящихся на один оборот коленчатого вала, равно например 360, то количество импульсов на выходах микропроцессоров МПО и МПЗ указывает, соответственно, на величину угла опережения или отставания газораспределительной фазы в градусах поворота коленва-ла. Обнуление счетной подсистемы реализуется автоматически в конце каждой процедуры счета.
При вычислении рассогласования текущих значений газораспределительных фаз с требуемыми значениями для данного режима работы ДВС, выходные сигналы счетной подсистемы через каждые пол-оборота коленчатого вала подаются в центральный процессор (ЦП), где сравниваются с калиброванными сигналами многомерной характеристики фаз, которые хранятся в постоянной памяти ЦП.
Литература
1. Соснин Д.А. Автотроника. Уч. пособие. М.: "Солон-Пресс", 2005.
Автор: Михаил Митин (г. Москва)
Источник: Ремонт и сервис