В НИЛ "Радиотехнических устройств СВЧ и КВЧ диапазона" Белорусского Государственного Университета Информатики и Радиоэлектроники, совместно с ОАО "Пеленг" (Минск), ГП "Арсенал" (Киев) была разработана многодиапазонная система наблюдения для вертолётов, а также изготовлен экпериментальный образец. Рассмотрим особенности данной системы.
Многодиапазонная система наведения (МСН) предназначена для:
В МСН реализуется современный комплексный подход к одновременному решению задач обнаружения и наблюдения в радиолокационном и оптическом диапазонах. Основными достоинствами МСН является:
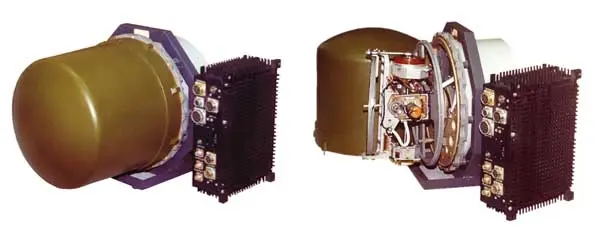
1) 3 mm РЛС высокоточной ближней навигации и измерения координат (рис. 1) представляет собой малогабаритную двухблочную конструкцию, состоящую из радиолокационной головки диаметром около 300 мм, длиной 450 мм и весом не более 15 кг, обеспечивающей экологически безопасное и скрытное импульсное электромагнитное излучение, и радиолокационный дисплей (notebook PC или на базе VGA ЖКИ панели).
Рис. 1. Внешний вид 3 мм РЛС
Все функциональные модули РЛС (рис. 2) объединены в два конструктивно законченных блока: антенную головку АГ и блок управления и питания УП.
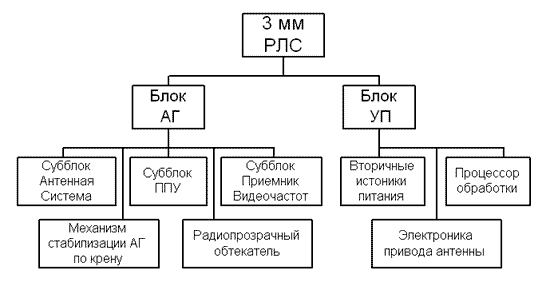
Рис. 2. Основные функциональные модули 3 мм РЛС
АГ функционально представляет собой радиочастотную часть СВЧ устройства. В состав АГ входит:
УП функционально представляет собой цифровую часть СВЧ устройства. В состав УП входят:
ППУ состоит из передающего и приемного модулей, соединенных через циркулятор развязки приема-передачи.
Передающее устройство генерирует периодическую последовательность зондирующих радиоимпульсов, которые поступают в антенну [1] и излучаются. Принятые антенной отраженные сигналы поступают в приемный модуль ППУ и преобразуются на первую промежуточную частоту 1,8 ГГц.
Приемник видеочастот предназначен для преобразования сигналов, поступающих с выхода ППУ на вторую промежуточную частоту 120 МГц, полосовую фильтрацию и логарифмическое амплитудное детектирование-усиление.
Выбор такой характеристики детектирования обусловлен необходимостью согласования динамического диапазона мощностей принимаемых сигналов с динамическим диапазоном аналого-цифрового преобразователя АЦП видеосигнала. После АЦП видеосигнал поступает на вход цифрового фильтра нижних частот для последетекторного межпериодного накопления принимаемого сигнала и далее, на вход порогового (решающего) устройства.
Сигнал с выхода порогового устройства в сопровождении служебных синхроимпульсов, позволяющих определить дальность до объекта, являются выходным сигналом СВЧ устройства.
Зона обзора:
Время сканирования зоны обзора:
Дальность обнаружения:
СКО пеленгации:
Разрешающая способность:
Стабилизация зоны обзора по угловым координатах производится внешними датчиками 3-D отображения радиолокационных данных в координатах азимут-угол места с цветовым кодированием дальности и/или в координатах азимут-дальность с цветовым кодированием интенсивности сигнала.
Имеется высокоуровневый встроенный контроль состояния, позволяющий производить расширенное тестирование от внешнего компьютера.
Потребляемая мощность радиолокационной головки менее 40 Вт от источника постоянного тока 24... 30 В.
2) Система техничесокого зрения (СТЗ) (рис. 3 и 4) обеспечивает наблюдение, обнаружение, распознавание и слежение за целями в реальном масштабе времени, а также выдает информацию для управления вертолетом с целью обеспечения его посадки в заданном районе.
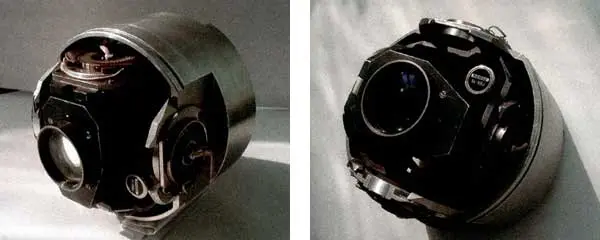
Рис. 3. Система техничесокого зрения

Рис. 4. Система техничесокого зрения
Рабочее время:
Расстояние слежения (в условиях видимости свыше 20 км):
Поле зрения:
Поле зрения контролируемо изменяется от максимального к минимальному и наоборот в ручном или автоматическом режимах.
Система сканирования (развертка) телевизионных сигналов:
В режиме "слежение" возможно осуществление слежения как с корреляцией по участку, так и слежение по центроиде. В обоих случаях выход информации 50 раз/с.
Серворама представляет собой гиростабилизированную, двухкарданную платформу со следующими основными техническими характеристиками:
При изменении пространственной ориентации поля зрения по двум осям по синусоиде с максимальной скоростью 6,28°/с и максимальным ускорением 40°/с, погрешность стабилизации линии визирования составляет менее чем 0,4°, а погрешность слежения - менее 0,05° (в поле зрения 3°'4° для неподвижных объектов).
Условия окружающей среды:
Габариты и вес:
СТЗ подключается к источнику постоянного тока 27±3 В и потребляет ток не более 4 А.
При конструировании СТЗ соблюдена структура, которая представлена на рис. 5. СТЗ содержит следующие модули:
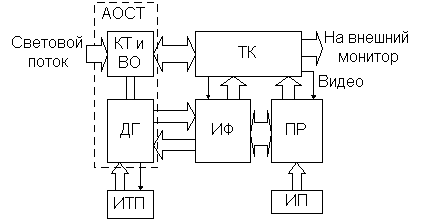
Рис. 5. Структурная схема системы технического зрения
Установленные в общем корпусе, эти модули представляют единое законченное изделие, которое работает следующим образом [2].
Световой поток в конце поля зрения от участка подстилающей земной поверхности проходит через оптическую систему, которая формирует на мишени КТ, представляющей собой матрицу фоточувствительного прибора с зарядовой связью, световое изображение. КТ преобразует это оптическое изображение в стандартный видеосигнал ВС.
В устройстве ТК, включающем КТ, видеоусилитель ВУ, синхрогенератор СГ, окончательно формируется ВС в соответствии со спецификой аппаратуры. Аналоговый ВС передается на процессор ПР, а также через ИФ на выход СТЗ для отображения на мониторе оператора. ВС на входе ПР преобразуется в цифровую форму. ПР для дискретизации и квантования ВС, вычисления положения объекта относительно центра растра по заданным алгоритмам и т.д. ДГ предназначена для управляемого разворота вариообъектива и КТ в пространстве вокруг двух осей и стабилизации положения оптической оси нагрузки при полетных колебаниях летательного аппарата (в данном случае вертолета). На ДГ жестко закреплена КТ с ВО и исполнительные устройства (двигатели) управления положением ДГ (полем зрения КТ) и параметрами ВО.
АОСТ представляет собой совокупность компонентов, обеспечивающих функции (назначение) аппаратуры обзора пространства в заданной зоне (пределах), стабилизации поля зрения ВО и КТ, а также управления пространственным положением и размерами этого поля зрения и интенсивности светового потока, передаваемого ВО на фоточувствительный прибор с зарядовой связью КТ.
ИФ предназначен для обеспечения взаимодействия СТЗ с внешними и внутренними устройствами, осуществления функций управления режимами работы отдельных модулей СТЗ и обеспечения взаимодействия между ними.
ИП предназначен для обеспечения вторичными питающими напряжениями всех модулей СТЗ, в том числе источника трехфазного питания. ИТП предназначен для обеспечения вторичными питающими напряжениями ДГ.
Заложенные в экспериментальном образце системные, схемотехнические и конструкторские решения, а также используемая элементная база и конструктивные материалы соответствуют современному уровню техники.
Автор: Веретенников Игорь,
г. Минск, Беларусь
E-mail: igor@radioradar.net