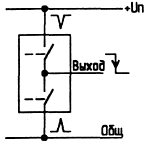
Рис.1. Эквивалентная схема логического элемента
Несмотря на то что цифровые ИМС давно и прочно вошли в арсенал радиолюбителей, многие сталкиваются с проблемами при разработке различных устройств с использованием как ТТЛ, так и КМОП-микросхем. Это приводит к тому, что "правильно" (т.е. по схеме) собранное устройство оказывается весьма "капризным" и чуть ли не полностью неработоспособным. После двух-трех неудачных попыток оживить схему все списывается на "незамеченные" опечатки, ошибки в схеме, неисправные детали и т.п.
В том, что такие взгляды достаточно распространены, автору пришлось убедиться лично. Это и побудило ею к написанию предлагаемой статьи. Большинство проблем при налаживании цифровых схем связано с недостаточными мерами по обеспечению требуемой помехоустойчивости.
Существует заблуждение, что цифровые схемы обладают чуть ли не абсолютной помехоустойчивостью. Скорее всего, оно сформировалось при сравнении с аналоговыми схемами. Однако такое сравнение некорректно, так как процессы, происходящие в цифровых схемах, иные, чем в аналоговых, что, соответственно, требует и иных подходов. Если в аналоговых схемах источники помех, как правило, внешние, то в цифровых схемах - внутренние, из чего следует, что рассматривать цифровые схемы с позиции помехоустойчивости аналоговых схем нельзя.
Конечно же, прежде чем браться за паяльник или рисовать печатную плату, следует хотя бы в общих чертах уяснить назначение каждой цифровой схемы (триггера, счетчика и т.д.). Главной спецификой цифровых схем является то, что основное внимание следует уделить не сигнальным, как казалось бы на первый взгляд, цепям, а шинам питания.
Для того чтобы лучше это понять, рассмотрим эквивалентную схему логического элемента, показанную на рис.1 (напомню, что любая логическая ИМС состоит в конечном счете из "кучи" логических элементов). Выход логического элемента можно представить в виде двух ключей, коммутирующих выход на шину питания или на общий провод. В связи с тем что время переключения полупроводниковых приборов - величина конечная (т.е. переключение происходит не мгновенно), кратковременно возникает ситуация, когда оба ключа замкнуты, и через них течет сквозной ток. Несмотря на то что время нахождения ключей в замкнутом состоянии мало, на шинах питания появляются короткие импульсы ("выбросы"). Частота этих импульсов совпадает с частотой переключения. Эти импульсы и создают большинство проблем в цифровых схемах. Амплитуда выбросов может изменяться в широких пределах, что зависит от выходного тока данной серии ИМС, количества одновременно переключающихся элементов и т.д.
Рис.1. Эквивалентная схема логического элемента
Чтобы разобраться в возможных последствиях, обратимся к рис.2. Микросхема DD1 переключается и является источником выбросов. Микросхема DD2 находится в состоянии логического "0", к ее выходу подключен вход ИМС DD3, которая, допустим, является неинвертирующим элементом (на ее выходе также логический "0"). Так как в момент переключения за счет выброса потенциал общего провода резко повышается, потенциал выхода DD2 также повысится. Если амплитуда выброса достигнет порога переключения, элемент DD3 переключится и сформирует на своем выходе "полноценный" логический импульс, который способен полностью нарушить работу остальной схемы.
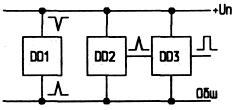
Рис.2. Функциональная схема цифрового устройства
Данная проблема ярче всего проявляется в ТТЛ-схемах и меньше - в КМОП. Это объясняется разницей входных характеристик этих двух основных семейств цифровых ИМС. Как известно, для ТТЛ логический "0" лежит в диапазоне напряжений от 0 до 0,8 В; логическая "1" - от +2,4 до +5 В (для различных серий эти цифры могут немного отличаться). Между ними лежит зона неопределенности. Для КМОП ИМС существует четкий порог переключения +Uп/2 (где Uп - напряжение питания). Все уровни выше этого - логическая "1", ниже - логический "0". Однако на практике зона неопределенности все же существует, занимая пределы где-то от 0,45Uп до 0,55Uп. При попадании входного сигнала в этот предел возможна паразитная генерация на частоте, близкой к предельной для данных элементов. В тех случаях, когда КМОП-элемент используется как компаратор, в схему желательно ввести гистерезис.
Теперь рассмотрим диаграммы на рис.3. Для того чтобы переключить элемент, на входе которого — логический "0", достаточно импульса помехи амплитудой 0,8 В. Т.е. помехоустойчивость по уровню логического "0" равна 0,8 В. Помехоустойчивость по уровню логической "1" выше — 2,4 В. В связи с этим более предпочтительный активный уровень для ТТЛ-микросхем — логический "0", т.е. чтобы в остальное время входы элементов находились в состоянии логической "1". Несоблюдение этого простого правила снижает помехоустойчивость где-то в 3 раза, что весьма существенно.
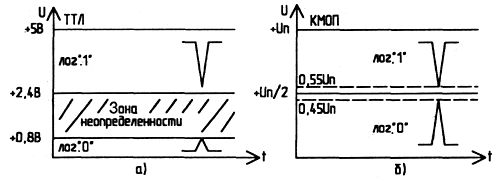
Рис.3. Диаграммы напряжений
Для КМОП-микросхем помехоустойчивость по обоим уровням одинакова и составляет 0,45Uп. Поэтому в качестве активного можно выбирать любой уровень (чаще всего берется логическая "1").
Если в схеме синхронно переключаются несколько ИМС, амплитуда выбросов может достигать нескольких вольт (особенно в ТТЛ-схемах), поэтому лучше такие узлы выполнять с отдельными шинами питания (даже на отдельных платах). Стоит также обратить внимание на то, что при использовании ТТЛ-микросхем те входы ИМС, на которые постоянно подается логическая "1", иногда оставляют свободными. С "электрической" точки зрения свободный ТТЛ-вход и вход под потенциалом логической "1" эквивалентны, но с точки зрения помехоустойчивости получается совсем иная картина. Помехоустойчивость свободного ТТЛ-входа близка к 0! Если же подключить этот вход через резистор 1 кОм к шине +5 В, помехоустойчивость входа возрастет до 2,6 В. Поэтому не стоит экономить, создавая потенциально неустойчивые конструкции. Для КМОП-микросхем оставлять входы свободными вообще недопустимо, их нужно обязательно подключать к шине питания или к общему проводу.
Вполне понятно, что основной метод борьбы с выбросами - фильтрация напряжения питания. Однако традиционный "аналоговый" подход - поставить "электролит" побольше - в данном случае не даст результата. В аналоговых схемах обычно приходится фильтровать сетевые составляющие 50 и 100 Гц, поэтому такой метод оправдан. В цифровой схеме частота выбросов может лежать в широких пределах - от 0 до десятков мегагерц.
Теперь самое время вспомнить, что, в силу конструктивных особенностей, любой "электролит" имеет собственную индуктивность (рис.4). В итоге эта паразитная индуктивность "не пустит" высокочастотные импульсы к емкости. Поэтому неотъемлемой частью любого фильтра в цифровых схемах являются керамические (безындуктивные) конденсаторы емкостью 0,047...0,22 мкФ, и ошибкой является их замена на пленочные, металлобумажные и т.п. типы конденсаторов, обкладки которых скручены, т.е. обладают заметной индуктивностью.
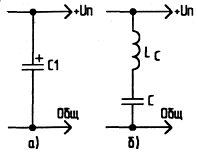
Рис.4. а) электролитический конденсатор; б) эквивалентная схема "электролита"
Эти конденсаторы, называемые блокирующими (блокировочными), нужно равномерно распределить вдоль шины питания. "Продвинутые" импортные панельки под цифровые ИМС уже содержат такой конденсатор. К сожалению, их нельзя использовать под старые ИМС ТТЛ с нестандартной разводкой питания (К155ИЕ2, К155ИЕ5 и др.). Количество блокирующих конденсаторов обычно подбирается опытным путем. Если в схеме такие конденсаторы отсутствуют, не стоит думать, что они не нужны, просто большинство авторов (особенно в сложных схемах) их, в целях упрощения графики, не показывают.
Не менее важным обстоятельством является правильная разводка общего провода. Полагать, что потенциал общего провода в любой точке равен нулю, было бы недальновидно. А неправильная разводка земли способна свести на нет все старания по борьбе с выбросами. Общий провод на любой плате, будь то дорожка или гибкий проводник, обладает не только активным сопротивлением, но и индуктивностью (существует еще, конечно, распределенная емкость между проводниками, но ею в большинстве случаев можно пренебречь). А следовательно, с ростом частоты сопротивление общего провода способно значительно увеличиться. Чем это чревато? Взглянем на рис.5. Первая схема (рис.5а) иллюстрирует достаточно распространенную ситуацию, когда функциональные узлы соединены по общему проводу последовательно. Допустим, что узел А1 находится в статическом режиме, а А2 переключается (т.е. является источником выбросов). Комплексные сопротивления участков общего провода составят делитель напряжения, из-за которого несколько ослабленные выбросы проникнут в А1. Поэтому такой разводки "массы" следует избегать. На рис.5б показана параллельная разводка массы. В этом случае проникновение выбросов с общего провода узла А1 в общий провод А2 практически отсутствует. В любом случае дорожки шин питания и земли следует выполнять как можно большей ширины, а провода брать максимально возможного для данной схемы сечения.
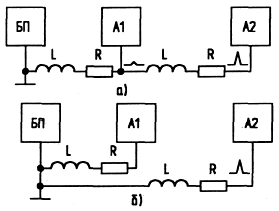
Рис.5. а) функциональные узлы соединены по общему проводу последовательно;
б) параллельная разводка массы
Еще следует обратить внимание на нагрузочную способность источника питания. Очень часто упускают из вида тот факт, что в динамическом режиме цифровые ИМС потребляют в несколько раз больший ток, чем в статическом. Кроме того, ток потребления возрастает с приближением частоты переключения элементов к максимальной для данной серии. В практике автора был случай, когда схема примерно из 20 ИМС ТТЛ "сажала" источник питания почти до нуля. Поэтому при расчетах источников питания следует исходить из максимального тока потребления одним корпусом данной серии.
В заключение хочется посоветовать радиолюбителям при конструировании сложных цифровых схем разбивать схему на законченные функциональные узлы и выполнять их на отдельных платах. Это позволит без труда наладить узлы по отдельности, а потом, убедившись в их работоспособности, налаживать схему в целом. Такой подход позволяет также легко модернизировать схему, заменяя узлы более совершенными. И уж конечно, совсем неплохо при разработке схем заглядывать в справочники, например, в [1, 2].
Источники
Автор: А.УВАРОВ, г.Белгород, E-mail: uvandre@yandex.ru