Беспроводный компьютерный манипулятор "мышь" фирмы Microsoft питается от двух гальванических элементов или аккумуляторов. Вот измеренные значения потребляемого от элементов питания тока: 36,6 мА - при активной работе "мышью"; 3,9 мА - по окончании активной работы; менее 1,1 мА - через несколько минут после этого; 80...92 мкА - в состоянии "сна" (для восстановления активности необходимо нажать на любую кнопку "мыши").
Этот манипулятор построен на микроконтроллере НТ82М72, снабженный встроенным передатчиком на 27 МГц. Согласно описанию, микроконтроллер работоспособен при напряжении 2...3,3 В. Могу подтвердить, пока напряжение каждого из двух установленных в "мыши" элементов питания превышает 1 В, она действительно работает без сбоев. Но зачастую, особенно после продолжительной эксплуатации, аккумуляторы разряжаются неравномерно. Хотя один из них еще сохраняет достаточный заряд, напряжение второго уже опустилось значительно ниже 1 В.
Такое бывает и при использовании гальванических элементов. Обычно при недопустимо низком напряжении питания "мыши" ее курсор на экране компьютера начинает подергиваться, а затем хаотично перескакивать с места на место. Но чтобы определить, какой из элементов питания слишком сильно разряжен, не обойтись без вольтметра.
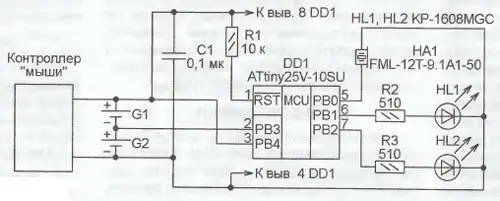
Рис. 1
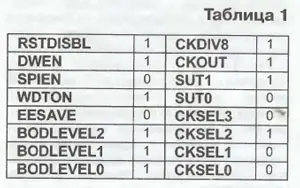
Исходя из необходимости контролировать степень заряженности обоих элементов, я разработал и встроил в "мышь" индикатор. Он содержит минимальное число компонентов и построен на микроконтроллере ATtiny25V-10SU, способном работать от напряжения 1,8 В. Схема индикатора показана на рис. 1, а конфигурация микроконтроллера, которую необходимо установить при его программировании, - в табл. 1. На время программирования выводы микроконтроллера соединяют с программатором в следующем порядке: 1 - RST, 4 - GND, 5 - MOSI, 6 - MISO, 7 - SCK, 8 - VCC. Пьезоизлучатель звука НА1 на это время лучше отключить, остальные элементы программированию не помешают.
При работе сигнализатора напряжение питания на микроконтроллер DD1 поступает от тех же элементов G1 и G2, что и на контроллер мыши. Светодиоды HL1 и HL2 начинают периодически вспыхивать, когда напряжение элементов с теми же порядковыми номерами менее 1 В. Резисторы R2 и R3 задают ток светодиодов. Пьезоизлучатель звука НА1 просигнализирует о недопустимой разрядке любого из элементов питания. Примененные светодиоды KP-1608MGC - для поверхностного монтажа зеленого цвета свечения. Их можно заменить любыми другими, подходящими по цвету и яркости свечения и размерам.
Для снижения потребляемого сигнализатором тока микроконтроллер DD1 тактируется от встроенного генератора частотой 128 кГц и большую часть времени находится в "спящем" режиме. По сигналу сторожевого таймера микроконтроллер каждые 2 с "просыпается", запускает встроенный в него АЦП, измеряющий напряжение на выводах 2 и 3, и сравнивает полученные значения с допустимыми, хранящимися в памяти.
Средний ток, потребляемый микроконтроллером во время работы АЦП и выполнения вычислений, - 9 мкА. При подаче сигнала (включен один свето-диод и работает излучатель звука НА1) ток увеличивается до 1 мА По окончании сигнала микроконтроллер вновь "засыпает" и потребляемый ток уменьшается до 6,5 мкА.
При одновременной разрядке элементов до 1 В их суммарное напряжение на выводах питания микроконтроллера DD1 станет равным 2 В, что на 0,2 В больше минимально допустимого. Однако в случае, когда один элемент разрядился раньше второго, а сигнал об этом был проигнорирован, суммарное напряжение может стать и меньше 1,8 В, что приведет к сбоям, а то и к полной остановке работы микроконтроллера DD1. Сигнализатор в этой ситуации поведет себя непредсказуемо. Поэтому пренебрегать своевременной заменой гальванических элементов или зарядкой аккумуляторов не следует.
В микроконтроллер ATtiny25 встроен источник образцового напряжения 1,1 ±0,1 В. Именно таким может быть установлено наибольшее значение порога, при пересечении которого подается сигнал о разрядке аккумулятора. Наименьший возможный порог - 0,9 В. Это половина минимального напряжения питания. Записав в энергонезависимую память микроконтроллера соответствующие константы, можно установить любой пороговый уровень в этом интервале.
Измерение напряжения на элементах питания G1 и G2 производится в разных режимах работы АЦП. Напряжение на элементе G2 измеряется в недифференциальном режиме относительно общего провода (вывода 4 микроконтроллера). Суммарное напряжение на двух элементах, поскольку оно превышает образцовое (1,1 В), в таком режиме изме-
рить невозможно. Поэтому программа переключает АЦП в дифференциальный режим, и напряжение на элементе G1 измеряется как разность значений напряжения на выводах 2 и 3.

В экземпляре микроконтроллера, использованном автором, записью в EEPROM кодов из табл. 2 были установлены пороги разрядки 1 В для обоих элементов питания. При записи тех же кодов в другие экземпляры пороговые уровни, скорее всего, получатся иными В первую очередь по причине разброса значений внутреннего образцового напряжения.
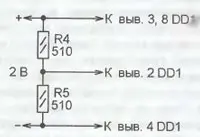
Рис. 2
Чтобы занести в EEPROM микроконтроллера изготовленного сигнализатора значения констант, правильно задающих пороги, необходимо, прежде всего, установить между выводами 3 и 2 (для G1), 2 и 4 (для G2) значения напряжения, равные нужным порогам. Сделать это можно двумя способами. Первый заключается в подаче на микроконтроллер согласно схеме, показанной на рис. 2, от отдельного источника напряжения питания, равного удвоенному значению желаемого порогового уровня. Например, 2 В для порога 1 В. Элементы питания G1 и G2 должны быть отключены.
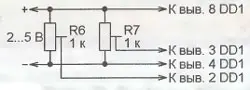
Рис. 3
Резистивный делитель R4R5 делит напряжение питания пополам. Его резисторы необходимо подобрать одинаковыми с возможно большей точностью Второй способ (схема на рис. 3) не требует точной установки напряжения внешнего источника питания. Оно может достигать 5 В но все-таки не следует делать его значительно большим суммы устанавливаемых порогов. Это может понизить точность их установки. Нужных значений напряжения между выводами 2 и 4, 3 и 2 микроконтроллера добиваются подстроечными резисторами R6 и R7.
Для записи констант в EEPROM достаточно, подав на сигнализатор с запрограммированным микроконтроллером напряжение питания и порогов по одной из рассмотренных схем, требует точной установки напряжения внешнего источника питания. Оно может достигать 5 В но все-таки не следует делать его значительно большим суммы устанавливаемых порогов. Это может понизить точность их установки. Нужных значений напряжения между выводами 2 и 4, 3 и 2 микроконтроллера добиваются подстроечными резисторами R6 и R7.
Для записи констант в EEPROM достаточно, подав на сигнализатор с запрограммированным микроконтроллером напряжение питания и порогов по одной из рассмотренных схем,
соединить его вывод 1 (RST) с выводом 4 (GND), а затем соединить с выводом 4 и вывод 5 (РВО). Через небольшой промежуток времени выводы 1 и 4, а за ними и выводы 5 и 4 можно разомкнуть.
запрограммированным микроконтроллером напряжение питания и порогов по одной из рассмотренных схем,
соединить его вывод 1 (RST) с выводом 4 (GND), а затем соединить с выводом 4 и вывод 5 (РВО). Через небольшой промежуток времени выводы 1 и 4, а за ними и выводы 5 и 4 можно разомкнуть.
Вспышка обоих светодиодов подтвердит, что значения порогов записаны в энергонезависимую память.
Осталось закрепить собранный сигнализатор внутри корпуса "мыши", поместив светодиоды в имеющиеся технологические или специально просверленные в корпусе отверстия. Пьезоиз-лучатель НА1 для лучшей слышимости его сигналов приклеивают к одной из стенок корпуса. После соединения с элементами питания "мыши" сигнализатор готов к работе.
Программу микроконтроллера можно скачать здесь
Автор: А. Балахтарь, г. Первоуральск Свердловской обл.