Наверное, многим знаком ультразвуковой дальномер HC-SR04 (Ultrasonic Ranging Module HC-SR04), далее дальномер HC-SR04 [1]. Он снабжён двумя ультразвуковыми преобразователями-излучателями, один - передающий, второй - приёмный, а принцип работы основан на том, что один преобразователь излучает короткий сигнал, а второй принимает отра-жённый от какого-либо объекта сигнал. Измерив временной промежуток между излучённым и отражённым сигналами и зная скорость звука, можно определить расстояние до этого объекта. Наиболее широко дальномер НС-SR04 используется совместно с микроконтроллерами и, в частности, с платформой Arduino как дальномер или датчик приближения [2, 3], но существуют также варианты его использования без микроконтроллера [4-7].

Рис. 1. Схема устройства
Дальномер НС-SR04 можно использовать и для построения датчика движения. Для этого надо постоянно контролировать расстояние до объекта, и если оно меняется, значит, он движется. Но и в этом случае также можно обойтись без платы Arduino или другого микроконтроллера. Схема такого устройства показана на рис. 1. Дальномер НС-SR04 работает в штатном режиме. На ОУ DA1.1 собран генератор запускающих импульсов с длительностью несколько микросекунд и периодом следования около 130 мкс. Период следования импульсов определяется в основном постоянной времени цепи R4C2, а длительность импульса - цепью R6VD1C2. Эти импульсы поступают на вход Trig дальномера НС-SR04. По спаду каждого импульса дальномер излучает пачку из восьми ультразвуковых зондирующих импульсов на частоте 40 кГц. Через 1 мкс после окончании пачки зондирующих импульсов на выходе Echo дальномера появится высокий логический уровень, который сменится на низкий, когда в приёмник попадёт отражённый от объекта сигнал. Таким образом, длительность импульса на выходе Echo зависит от расстояния до препятствия. Измерив длительность этого импульса и проведя несложные расчёты, можно определить это расстояние. Так обычно и происходит в устройствах, собранных на дальномере HC-SR04 и микроконтроллере (или плате семейства Arduino). По результатам измерения принимается какое-либо решение. Если это расстояние меняется, можно сделать вывод о том, что объект перемещается. Если отражённого сигнала не будет или он будет ниже порога обнаружения дальномера, длительность импульса будет равна 38 мс. Поэтому период следования запускающих импульсов должен быть не менее 50 мс.
В этом устройстве используется аналоговый способ преобразования выходного сигнала дальномера HC-SR04. Импульсы напряжения c выхода Echo поступают на интегрирующую цепь R7C5. Напряжение на конденсаторе С5 будет равно среднему значению напряжения этих импульсов. Если до объекта, который отразил сигнал, небольшое расстояние, длительность импульсов невелика, поэтому напряжение на конденсаторе мало. По мере увеличения расстояния до объекта длительность импульсов растёт, а напряжение на конденсаторе С5 увеличивается. При изменении расстояния напряжение на конденсаторе изменяется. Переменная составляющая напряжения через конденсатор С6 поступает на инвертирующий вход ОУ DA1.2, на котором собран компаратор. Образцовое напряжение компаратора поступает с движка подстроечного резистора R9 на неинвертирующий вход этого ОУ. На инвертирующий вход также поступает постоянное напряжение с резистивного делителя R1R5. В исходном состоянии напряжение на инвертирующем входе ОУ DA1.2 превышает напряжение на неинвертирующем, поэтому на выходе этого ОУ будет напряжение, близкое к нулю.
Когда появится движущийся объект, на инвертирующий вход поступит переменная составляющая напряжения. В моменты, когда напряжение на этом входе будет меньше напряжения на неинвертирующем входе, компаратор станет переключаться в состояние с высоким логическим уровнем на выходе. В результате на выходе ОУ DA1.2 будет случайная последовательность импульсов, сигнализирующих о движущемся объекте.
Напряжение питания дальномера HC-SR04 и ОУ стабилизировано интегральным стабилизатором напряжения DA2. Оксидные конденсаторы служат для подавления пульсаций и помех по цепям питания. Питается устройство от батареи напряжением 7...12 В. Это может быть батарея "Крона" (6F22) или батарея, составленная из нескольких гальванических элементов или аккумуляторов, а также сетевой источник питания, потребляемый устройством ток - 6,3 мА.

Рис. 2. Чертёж печатной платы устройства и схема размещения на ней элементов

Рис. 3. Смонтированная плата
Большинство деталей размещены на односторонней печатной плате из стеклотекстолита толщиной 1...1,5 мм, чертёж которой и схема размещения на ней элементов показаны на рис. 2, монтированная плата показана на рис. 3, а вместе с дальномером HC-SR04 - на рис. 4. Применены постоянные резисторы МЛТ, С2-23, подстроечный - СП3-19, оксидные конденсаторы - К50-35 и импортные, остальные - плёночные или керамические. Диод - любой маломощный кремниевый импульсный. Для подключения дальномера HC-SR04 можно применить гнёзда из серии PSB.

Рис. 4. Смонтированная плата вместе с дальномером HC-SR04
Чувствительность датчика устанавливают подстроечным резистором R9. Чтобы локализовать область, которую контролирует датчик, и уменьшить помехи от посторонних объектов, на ультразвуковые преобразователи дальномера HC-SR04 можно надеть изготов ленные из картона трубки длиной несколько сантиметров и диаметром, соответствующим диаметру преобразователя. В этом случае область пространства, в которую будут попадать излучаемые ультразвуковые сигналы, сократится. Дальность действия датчика будет меньше максимальной дальности дальномера HC-SR04.
Для индикации срабатывания датчика к его выходу можно подключить световой индикатор - светодиод или акустический - излучатель со встроенным генератором (рис. 5,а и рис. 5,б). Светодиод может быть любого свечения маломощный, яркость свечения можно изменить подборкой резистора R1 в интервале от 100 Ом до нескольких килоом. Звуковой излучатель - маломощный с напряжением питания 5...6 В.
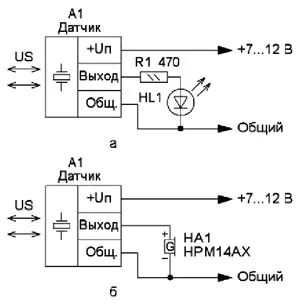
Рис. 5.

Рис. 6. Схема формирователя
Этот датчик можно использовать для подачи сигнала тревоги или включения осветительного прибора. Но его выходной сигнал не всегда для этого подходит, например, для включения на какое-то время осветительного прибора или сигнала тревоги. В этом случае потребуется формирователь, схема которого показана на рис. 6. Нумерация элементов продолжена. Формирователь представляет собой одновибратор (формирователь одиночного импульса), который запускается выходным сигналом датчика движения. Происходит это так. Сигнал с выхода на верхний по схеме вход логического элемента DD1.1 (вывод 2) поступает через ФНЧ R11C8, который подавляет короткие одиночные импульсы. Одновременно на этот вход через резистор R12 поступает постоянное напряжение смещения, которое повышает чувствительность одновибратора.
В исходном состоянии конденсатор С9 разряжен, а С8 заряжен примерно до трети напряжения питания (в данном случае около 4 В), что меньше напряжения переключения логического элемента DD1.1. Поэтому на выходе этого элемента будет лог. 1, а на выходе элемента DD1.2 лог. 0. Транзистор VT1 закрыт, и нагрузка обесточена. Когда на выходе компаратора появляется серия импульсов, конденсатор С8 заряжается до напряжения переключения логического элемента DD1.1, и на его выходе появляется лог. 0, а на выходе элемента DD1.2 - лог. 1. Транзистор VT1 открывается, и на его нагрузку поступает питающее напряжение. В качестве нагрузки можно использовать светодиодный светильник (светодиодную ленту) с номинальным напряжением 12 В или акустический излучатель (сирену) со встроенным генератором. Одновременно лог. 1 через конденсатор С9 поступает на нижний по схеме вход элемента DD1.1, и одновибратор остаётся в таком состоянии до тех пор, пока конденсатор С9 зарядится примерно до половины напряжения питания. После этого одновибратор переключится, транзистор VT1 закроется и нагрузка обесточится. Конденсатор С9 быстро разрядится через выход элемента DD1.2 и встроенный защитный диод, они установлены на входе каждого элемента этой микросхемы. После этого одновибратор снова готов к срабатыванию. Чертёж печатной платы датчика с одновибратором показан на рис. 7. Здесь можно применить переключательный полевой транзистор, который обеспечивает требуемый ток нагрузки.

Рис. 7. Чертёж печатной платы датчика с одновибратором
Следует учитывать, что этот датчик будет фиксировать движение на расстоянии меньшем, чем расстояние до объекта, от которого пришёл первый отражённый сигнал. Например, если отражённый сигнал пришёл от дверного проёма, а движение происходит за ним, дальномер HC-SR04 будет фиксировать расстояние до проёма, которое не изменяется, то есть реакции на такое движение не будет. Но это свойство может быть как недо
статком, так и преимуществом, в зависимости от назначения устройства.
Причём этот датчик более чувствителен к приближению объекта, чем к его удалению. Дело в том, что при отсутствии движения длительность импульса на выходе Echo дальномера А1 будет постоянной, значит, и напряжение на конденсаторе С5 не меняется. В идеальном случае при приближении объекта длительность импульса на выходе Echo будет уменьшаться, значит, будет уменьшаться напряжение на конденсаторе С5 и на инвертирующем входе ОУ DA1.2, поэтому на это время компаратор переключится в состояние с высоким уровнем на выходе. Опять же, в идеальном случае при удалении объекта длительность импульса на выходе Echo будет увеличиваться, значит, будет увеличиваться и напряжение на конденсаторе С5. Это увеличение поступит на инвертирующий вход ОУ DA1.2, поэтому состояние компаратора не изменится (ноль на выходе). Однако в реальности в обоих случаях изменение длительности импульса на выходе Echo будет носить частично случайный характер, в основном из-за особенностей движения объекта. Например, человек идёт и двигает руками. Но по принципу работы этот датчик более чувствителен к приближению объекта. Чтобы сделать его одинаково чувствительным при приближении и удалении объекта, взамен обычного надо применить двухпороговый компаратор, чтобы он переключался как при увеличении, так и уменьшении напряжения. Такой компаратор можно сделать не только на основе ОУ, но и на других элементах с пороговыми свойствами, например, параллельных стабилизаторах напряжения серии КР142ЕН19 или её зарубежного аналога - микросхем серии TL431 и её клонов [8].
Чертежи печатных плат имеются здесь.
Литература
1.Ultrasonic Ranging Module HC-SR04. - URL: https://lib.chipdip.ru/092/DOC00109 2302.pdf (24.12.21).
2.Ардуино: ультразвуковой дальномер HC-SR04. - URL: https://robotclass.ru/ tutorials/arduino-sonic-hc-sr04/ (24.12.21).
3.Автоматический выключатель света на микроконтроллере. - URL: http://www. texnic.ru/konstr/avtomatika/001/avtomatika 031.html (24.12.21).
4.Нечаев И. Ультразвуковой дальномер HC-SR04 без микроконтроллера. Часть 1. Сигнализаторы присутствия. - Радио, 2018, № 4, с. 59-62.
5.Нечаев И. Ультразвуковой дальномер HC-SR04 без микроконтроллера. Часть 2. Аналоговая "линейка". - Радио, 2018, № 5, с. 55, 56.
6.Нечаев И. Ультразвуковой дальномер HC-SR04 без микроконтроллера. Часть 3. Выключатель освещения. - Радио, 2018, № 6, с. 57, 58.
7.Нечаев И. Измеритель уровня жидкости на основе ультразвукового дальномера HC-SR04. - Радио, 2019, № 1, с. 34-36.
8.Нечаев И. Индикатор на двухпороговом компараторе. - Радио, 2021, № 5, с. 15, 16.
Автор: И. Нечаев, г. Москва